by  ZJ
ZJ
本文档描述了GNSS常见的坐标系、术语及其转换方法。
下列术语和定义适用于本文件。
2.1 地球椭球earth ellipsoid
近似表示地球的形状和大小,并且其表面为等位面的旋转椭球。
2.2 参考椭球reference ellipsoid
最符合一定区域的大地水准面,具有一定大小和定位参数的旋转地球椭球。
2.3 地心地固坐标系(空间直角坐标系)ECEF
空间直角坐标系,其xy平面与地球赤道面重合,x轴指向0°经度方向,y轴指向东经90°方向,z轴为与赤道平面垂直指向地理北极,构成右手坐标系。xyz轴随着地球一起旋转,在惯性空间中不再描述固定的方向。
2.4 大地坐标系 geodetic coordinate system
以地球椭球中心为原点、起始子午面和赤道面为基准面的地球坐标系。由于地球的形状不规则,在GPS/北斗中使用一个标准椭球体来近似描述,这样可以方便计算接收机的经度、纬度和高度。椭球体可以用两个参数来表示,长半轴和扁率,其他参数如短半轴、偏心率、第二偏心率等都可以由这两个参数导出。
2.5 椭球高/海拔高/大地水准面高(高程异常) ellipsoid/orthometric/geoid height
橙色曲线为参考椭球面,绿色曲线为地表(或GPS天线位置),h为椭球高,GPS定位解算结果(ECEF)在WGS84椭球下可转换为经纬度和椭球高h。蓝色曲线为大地水准面Geoid,对应于最小二乘下的全球平均海平面(Mean Sea Level),恒重力势平面,由于地球密度分布不均,各地的重力势存在差异,因而大地水准面不是规则的曲面。相对于大地水准面的高度H称为海拔高(orthometric height),或者平均海平面高(MSL)。大地水准面的高度N是大地水准面相对于椭球面的高度,也称高程异常。椭球高h、海拔高H和高程异常N三者之间的关系为h=H+N。参考椭球确定了之后,各个地区的高程异常N也是确定的,写在geoid.bin文件中。
2.6 站心坐标系(东北天坐标系)
站心坐标系也叫东北天坐标系ENU,用于表示以观察者为中心的其他物体的运动规律。以站心为坐标系原点,z轴与椭球法线重合,向上为正,y与椭球短半轴重合(北向),x轴与椭球长半轴重合(东向)。
2.7 高斯投影 Gauss projection
由于地球是球体,为了在地图上表示,将椭球面沿子午线划分成若干个经差相等的狭窄地带,然后各带分别投影到平面上。一般以赤道上某一经度的点为原点,计算投影后的坐标,为了使投影后的坐标为正数,通常在横轴加500km的常数。
2.8 坐标转换 coolrdinate transformation
包含坐标系变换和椭球基准变换两层含义。在测量数据处理过程中,采用适用的转换模型和转换方法,空间点从某一参考椭球基准下的坐标转换到另一坐标系统下的坐标,如WGS84转为北京54。坐标转换过程就是转换参数的求解过程。
2.9 坐标系变换 coordinate conversion
同一椭球基准下,空间点的不同坐标表示形式间进行变换。包括大地坐标系和空间直角坐标系的互相转换、空间直角坐标系与站心坐标系间的转换和高斯投影坐标正反算。
2.10 椭球变换 ellipsoid conversion
空间点在不同的参考椭球间的坐标变换。
2.11 平移参数 translation parameters
两坐标系转换时,新坐标系原点在原坐标系中的坐标分量。
2.12 旋转参数 rotation parameters
两坐标系转换时,把原坐标系中的各坐标轴左旋转到与新坐标系相应的坐标轴重合或平行时坐标系各轴依次转过的角度。
3.1 惯性坐标系与地球坐标系
惯性坐标系(或空固坐标系)在空间静止或匀速直线运动的坐标系。实际操作中很难建立惯性坐标系,方便用于天文学中对于描述星系中的卫星运行轨道。
地球坐标系(或地固坐标系)是固定在地球上而随地球一起在空间做自转和公转运动的坐标系。
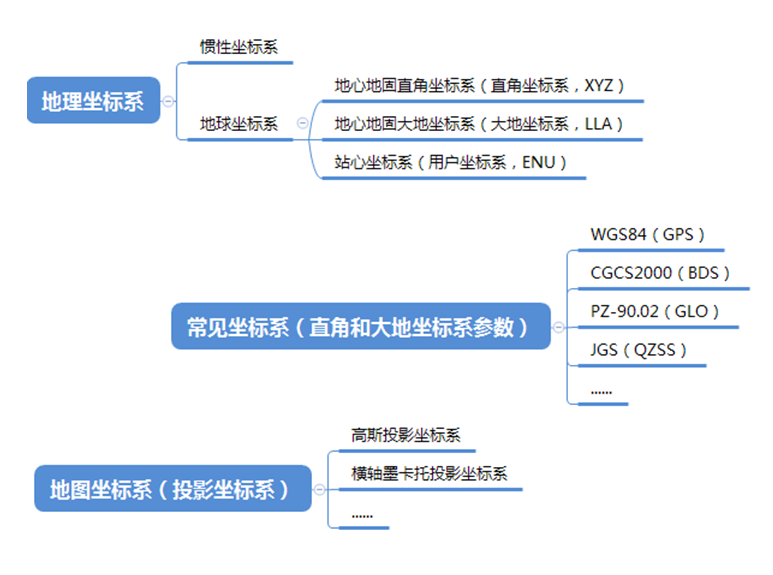
3.2 常用地球坐标系类型
建立地球坐标系需要确定的地理基准,如直角坐标系中的赤道、北极,大地坐标系的地球椭球模型。地球的北极点并不是固定不变的,地球的形状也不是完整的椭球,所以基于不同时间段不同测量方式确定的各国的坐标系参数会有微小的偏差。各国坐标系参数可在国家测绘局或宇航局的公开文件中查询。而常用的地球坐标系种类有以下几种:
3.2.1 直角坐标系(ECEF)
地心地固直角坐标系构建方式:
以地心作为坐标原点;
Z轴指向地球北极点;
X轴指向参考子午面(英国伦敦格林尼治子午面)与赤道的一个交点;
X、Y、Z三轴构成右手直角坐标系。
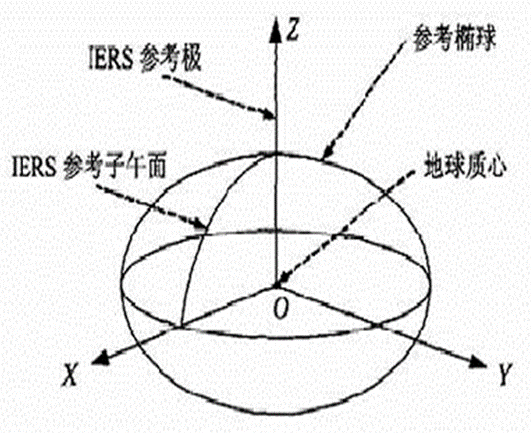
受地球自转和公转的影响,地球南北两极点并不是固定的;而不同测绘组织测量的地球南北两极点也存在位置偏差。按照不同时期或不同组织发布的地球极点位置建立的地心地固直角坐标系框架一致,但有微小的偏差。如GPS-ICD文件中说明GPS的直角坐标系是以IERS(国际地球自转服务组织)WGS84椭球体对应的地级为基准的;如BDS-ICD文件中说明BDS的直角坐标系是以IERS(国际地球自转服务组织)定义的地级为基准的;两者定义的直角坐标系,框架一致,但有微小的偏差。
3.2.2 大地坐标系(LLA)
首先需要先建立与地球表面最吻合的地球基准面,要求是以地球质心为原点建立一个与地球水准面(假想海平面)之间的高度差的平方和最小的基准椭球体。由于测量或建模方式的不同,不同国家或地区建立的地心地固大地坐标系之间框架一致,但椭球参数有微小的偏差。
建立地球基准面后,
定义大地纬度(简称纬度)是所在位置的基准椭球面法线与赤道面之间的夹角,赤道以北为正,赤道以南为负;
定义大地经度(简称经度)是所在位置的子午面与参考子午面的夹角,参考子午面以东为正,参考子午面以西为负;
定义大地高度(简称大地高)是所在位置到基准托球面法线的距离。查看3.5大地高/海拔高/高程异常值。
3.2.3 站心坐标系(ENU)
站心坐标系(或用户坐标系或东北天坐标系)是以用户所在位置为坐标原点,坐标轴分别垂直的指向东向、北向和天向的坐标系。可通过平移和旋转变换成地心直角坐标系。
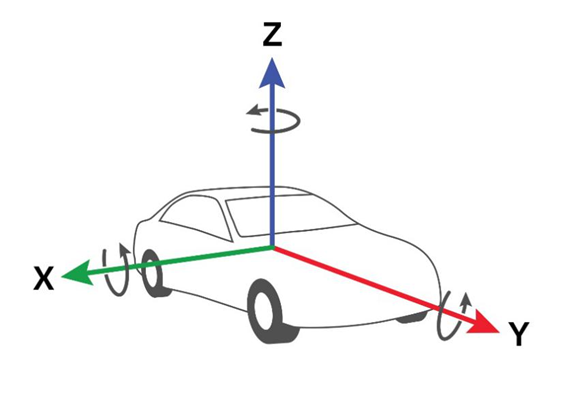
3.2.4 特殊站心坐标系——组合导航载体坐标系
载体坐标系(body frame),又称为运动载体坐标系,由导航中要解算的导航对象的原点和姿态确定。载体坐标系的原点即为导航结果所描述的对象,坐标轴却与载体固联。
常用的整机坐标系(Body)和车体坐标系(Vehicle)都可理解为载体坐标系的一种,因定义或应用场景的不同而有所差别,在此主要介绍我们目前常用的定义。
通常定义Y轴为前向(即正常航行的前进方向),Z轴为天向(即向下方向),X轴为右向,并由三个坐标轴组成正交坐标系。对于角运动来说,载体坐标系的轴也被称为滚动、俯仰和偏航轴,其中Y轴方向为滚动轴,X轴方向为俯仰轴,而Z轴方向为偏航轴,均符合右手螺旋法则规定。